ProBe Call Graph Data Format
Specification
Schema
Nodes
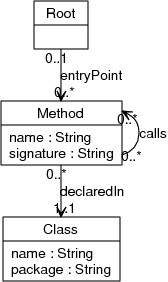
Root
Each call graph has a single Root node, which does not correspond
to any element of the program. It is used as the starting point of
entryPoint edges. The Root node has no attributes.
Method
Each Method node represents a method in the program. The name attribute
specifies the name of the method. The signature attribute specifies the
parameters and return type (but not the name) of the method in the same
format as they are stored in the a Method Descriptor in the Java class
file format (see The
Java Virtual Machine Specification, section 4.3.3).
Class
Each Class node represents a class in the program. The name attribute
specifies the name of the class, not including the package. For inner
classes, the name is determined as in the Java class file (i.e.
the name may contain $ signs). The package attribute specifies the
package in which the class is defined, with subpackages separated
by a period.
Edges
declaredIn
Each Method node has exactly one declaredIn edge to the Class node
corresponding to the class in which the method is declared.
entryPoint
Each method that executes without having been called from
any other method (i.e. it appears as the bottom-most method on the call stack
of some thread) has an entryPoint edge leading to it from the Root node.
calls
Whenever method a calls method b (i.e. b appears just above a on a call
stack), a calls edge appears from the Method node of a to the Method node of b.
Tools
CallGraphInfo
The CallGraphInfo tool computes summary statistics about the number of
entry points, reachable methods, and edges in the call graph.
Optionally, it also lists reachable methods and entry points.
Usage: java probe.CallGraphInfo [options] graph.gxl
-m : print list of reachable methods
-e : print list of entry points
-lib file : ignore methods in packages listed in file
CallGraphView
The CallGrahView tool is a web server that allows interactive navigation
of the call graph. Each web page served corresponds to a single method,
and contains links to all methods calling and called by it. The search
box is used to search for a method or class by name. If two call graphs
are given as parameters, the tool browses the first graph, but presents
methods not reachable in the second graph in a different colour (blue rather
than pink).
Usage: java probe.CallGraphView [options] supergraph.gxl [subgraph.gxl]
-port p: listen on port p (default: 8088)
CallGraphDiff
The CallGraphDiff tool finds reachable methods and edges present in the first
graph specified, but absent in the second graph specified.
Usage: java probe.CallGraphDiff [options] supergraph.gxl subgraph.gxl
-e : ignore edges in supergraph whose targets are entry points in subgraph
-r : ignore edges in supergraph whose targets are reachable in subgraph
-f : perform flow computation to rank edges by importance: edge algorithm
-ff : perform flow computation to rank edges by importance: node algorithm
-a : show all spurious edges rather than just those from reachable methods
-m : print names of missing methods
-p : ignore edges out of doPrivileged methods
-switch : switch supergraph and subgraph
CallGraphBFS
The CallGraphBFS tool finds paths or cycles between methods in a call graph.
When executed with one method as a parameter, it finds a shortest cycle
of calls leading from the method back to itself. When executed with
two methods as parameters, it finds a shortest path from the first
method to the second method.
Usage: java probe.CallGraphBFS graph.gxl package class methodname methodsig [package2 class2 methodname2 methodsig2]
